11.4.4.- Diseños (Óptimos) Generados por Computadora
Los diseños estándares de superficie de respuesta estudiados en las secciones anteriores, como el diseño central compuesto y el diseño de Box-Behnken y sus variantes (como el cubo con centros en las caras), son de uso generalizado porque son diseños bastante generales y flexibles. Si la región experimental es un cubo o una esfera, de manera típica existe un diseño de superficie de respuesta que será aplicable al problema. Sin embargo, ocasionalmente un experimentadorse encuentra con una situación en la que el diseño estándar de superficie de respuesta puede no ser una elección obvia. Los diseños generados por computadora son una alternativa por considerar en estos casos.
Hay tres situaciones en las que puede ser apropiado algún tipo de diseño generado por computadora.
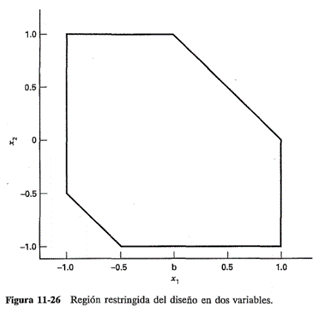
1. Una región experimental irregular. Si la región de interés del experimento no es un cubo o una esfera, los diseños estándares quizá no sean la mejor elección. Las regiones de interés irregulares ocurren con bastante frecuencia. Por ejemplo, un experimentador está investigando las propiedades de un adhesivo particular. El adhesivo se aplica a dos piezas y después se cura a una temperatura elevada. Los dos factores de interés son la cantidad de adhesivo aplicada y la temperatura de curado. En los rangos de estos dos factores, tomados como -1 a +1 en la escala de la variable codificada usual, el experimentadorsabe que si se aplica muy poco adhesivo y la temperatura de curado es muy baja, las piezas no se pegarán satisfactoriamente. En términos de las variables codificadas, esto lleva a una restricción sobre las variables del diseño, por ejemplo

donde x1 representa la cantidad aplicada de adhesivo y x2 la temperatura. Además, si la temperatura es demasiado elevada y se aplica mucho adhesivo, las piezas resultarán dañadas por la fatiga térmica o bien ocurrirá un pegado inadecuado. Por lo tanto, hay otra restricción sobre los niveles de los factores

En la figura 11-26 se muestra la región experimental que resulta de aplicar estas restricciones. Observe que las restricciones eliminan de hecho dos de los vértices del cuadrado, produciendo una región experimental irregular (en ocasiones a estas regiones irregulares se les llama "latas abolladas"). No existe ningún diseño de superficie de respuesta estándar que se ajuste exactamente a esta región.
2. Un modelo no estándar. Por lo general, un experimentador elige un modelo de superficie de respuesta de primer o de segundo orden, consciente de que este modelo empírico es una aproximación del verdadero mecanismo subyacente. Sin embargo, en ocasiones el experimentador puede tener un conocimiento o idea especial acerca del proceso bajo estudio que puede sugerir un modelo no estándar. Por ejemplo, el modelo
puede ser de interés. El experimentador estaría interesado en obtener un diseño eficiente para ajustar este modelo reducido de cuarto graqo. Como otra ilustración, en ocasiones se encuentran problemas de superficie de respuesta en los que algunos de los factores del diseño son variables categóricas. No hay diseños de superficie de respuesta estándares para esta situación (referirse a Myers y Montgomery [85a] para un estudio de las variables categóricas en problemas de superficie de respuesta).
3. Requerimientos inusuales para el tamaño de la muestra. Ocasionalmente, un experimentador quizá necesite reducir el número de corridas requeridas en un diseño estándar de superficie de respuesta. Por ejemplo, suponga que se pretende ajustar un modelo de segundo orden en cuatro variables. El diseño central compuesto para esta situación requiere entre 28 y 30 corridas, dependiendo del número de puntos centrales seleccionados. Sin embargo, el modelo sólo tiene 15 términos. Si las corridas tienen un costo muy elevado o se llevan mucho tiempo, el experimentador querrá un diseño con menos ensayos. Aun cuando los diseños generados por computadora pueden usarse para este fin, por lo general se cuenta con enfoques mejores. Por ejemplo, puede construirse un diseño compuesto pequeño para cuatro factores con 20 corridas, incluyendo cuatro puntos centrales, y también se cuenta con un diseño híbrido con apenas 16 corridas. Éstas son en general elecciones superiores al uso de un diseño generado por computadora para reducir el número de ensayos.
Gran parte del desarrollo de los diseños generados por computadora se deriva del trabajo de Kiefer [65a, b] y Kiefer y Wo1fowitz [66] en la teoría de los diseños optimales. Por diseño optimal se entiende un diseño que es "mejor" con respecto a algún criterio. Se requieren programas de computadora para construir estos diseños. El enfoque usual es especificar un modelo, determinar la región de interés, seleccionar el número de corridas que deberán hacerse, especificar el criterio de optimalidad y después elegir lospuntos del diseño de un conjunto de puntos candidatos que el experimentador consideraría usar. De manera típica, los puntos candidatos son una matriz de puntos distribuidos en la región factible del diseño.
Hay varios criterios de optimalidad populares. Quizá el de uso más generalizado es el criterio de optimalidad D. Se dice que un diseño es optimal D si

se minimiza. Ocurre que un diseño optimal D minimiza el volumen de la región de confianza conjunta para el vector de los coeficientes de regresión. Una medida de la eficiencia relativa del diseño 1 respecto del diseño 2 de acuerdo con el criterio D está dada por

donde x1 y x2 son las matrices X de los dos diseños y p es el número de parámetros del modelo.
El criterio de optimalidad A sólo se ocupade las varianzas de los coeficientes de regresión. Un diseño es optimal A si minimiza la suma de los elementos de la dÜj.gonal principal de (X'X)-1 [a ésta se le llama la traza de (X'X)-1 denotada generalmente como tr(X'X)-1]. Por lo tanto, un diseño optimal A minimiza la suma de las varianzas de los coeficientes de regresión.
Puesto que muchos experimentos de superficie de respuesta se refieren a la predicción de la respuesta, los criterios de la varianza de predicción son de gran interés práctico. Quizás el más popular de estos criterios sea el criterio de optimalidad G. Se dice que un diseño es optimal G si minimiza la varianza de predicción escalada máxima en la región del diseño. Es decir, si el valor máximo de

en la región del diseño es un mínimo, donde N es el número de puntos del diseño. Si el modelo tiene p parámetros, la eficiencia G de un diseño es precisamente

El criterio V considera la varianza de predicción en un conjunto de puntos de interés en la región del diseño, por ejemplo x1, x2, ..., xm. El conjunto de puntos podría ser el conjunto de candidatos del que se seleccionó el diseño, o podría ser alguna otra colección de puntos que tienen un significado específico para el experimentador. Un diseño que minimiza la varianza de predicción promedio en este conjunto de m puntos es un diseño optimal V.
En conjunto, a los criterios de diseño que se han venido estudiando suele llamárseles criterios de optimalidad alfabética. Existen algunas situaciones en las que el diseño optimal alfabético se conoce o bien puede construirse analíticamente. Un buen ejemplo es el diseño 2k que es optimal D, A, G y V para ajustar el modelo de primer orden en k variables o para ajustar el modelo de primer orden con interacción.
Sin embargo, en la mayoría de los casos el diseño optimal no se conoce y debe emplearse un algoritmo basado en computadora para encontrar un diseño. Muchos paquetes de software de estadística que soportan experimentos diseñados cuentan con esta capacidad. La mayoría de los procedimientos para construir diseños se basan en el algoritmo de intercambio. En esencia, el experimentador selecciona una matriz de puntos candidatos y un diseño inicial (quizá al azar) a partir de este conjunto de puntos. Entonces el algoritmo intercambia los puntos que están en la matriz, pero no en el diseño, con los puntos que están actualmente en el diseño, en un esfuerzo por mejorar el criterio de optimalidad seleccionado. Debido a que no se evalúan explícitamente todos los diseños posibles, no hay garantía de que se ha encontrado un diseño optimal, pero el procedimiento de intercambio suele asegurar que se obtiene un diseño que está "cerca" del optimal. Algunas implementacionesrepiten varias veces el proceso de construcción del diseño, empezando con diseños iniciales diferentes, para incrementar la posibilidad de que se obtendrá un diseño final que esté muy cerca del optimal.
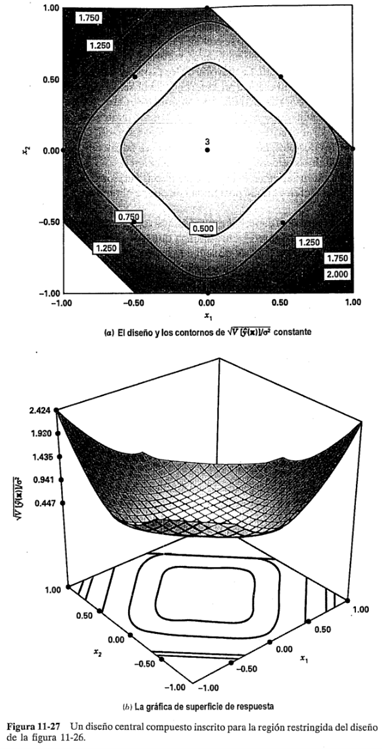
Para ilustrar algunas de estas ideas, considere el experimento del adhesivo expuesto anteriormente y que llevó a la región experimental irregular de la figura 11-26. Suponga que la respuesta de interés es la fuerza de desprendimiento y que quiere ajustarse un modelo de segundo orden para esta respuesta. En la figura 11-27a se muestra un diseño central compuesto con cuatro puntos centrales (12 corridas en total) inscrito dentro de esta región. Se trata de un diseño que no es rotable, pero es el DCC más grande que puede ajustarse dentro del espacio del diseño. Para este diseño |(X'X)-1|=1.852 E-2, Yla traza de (X'X)-1 es 6.375. En la figura 11-27a también se muestran los contornos de desviación estándar constante de la respuesta predicha, calculada suponiendo que σ= 1. En la figura 11-27b se muestra la gráfica de superficie de respuesta correspondiente.
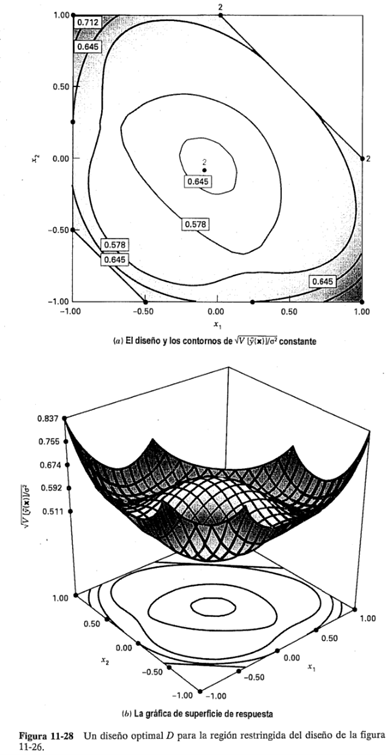
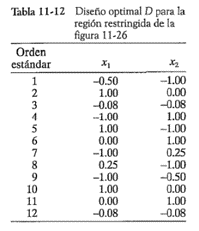
En la figura 11-28a y en la tabla 11-12 se muestra un diseño optimal D de 12 corridas para este problema, generado con el paquete de software Design-Expert. Para este diseño, |(X'X)-1|= 2.153 E-4. Observe que el criterio D es considerablemente mejor para este diseño que el DCC inscrito. La eficiencia relativa del DCC inscrito con respecto al diseño optimal D es
Es decir, el DCC inscrito tiene una eficiencia de sólo 47.6% que la del diseño optimal D. Esto implica que tendrían que hacerse 1/0.476 = 2.1 réplicas del DCC (o aproximadamente el doble) para tener la misma precisión de la estimación de los coeficientes de regresión que la que se consigue con el diseño optimal D.
La traza de (X'X)-1 es 2.516 para el diseño optimal D, lo cual indica que la suma de las varianzas de los coeficientes de regresión es considerablemente más pequeña para este diseño que para el DCC. En las figuras 11-28a y b se muestran también los contornos de desviación estándar constante de la respuesta predicha y la gráfica de la superficie de respuesta asociada (suponiendo que σ= 1). En general, los contornos de la desviación estándar de la predicción son más bajos para el diseño optimal D que para el DCC inscrito, particularmente cerca de los límites de la región de interés, donde el DCC inscrito no incluye ninguno de los puntos del diseño.
En la figura 11-29a se muestra un tercer diseño, creado al tomar las dos réplicas de los vértices de la región en el diseño optimal D y pasarlas al centro del diseño. Esto podría ser una idea útil, ya que la figura 11-28b muestra que la desviación estándar de la respuesta predicha se incrementa ligeramente cerca del centro de la región del diseño para el diseño optimal D. En la figura 11-29a se muestran también los con tornos de desviación estándar constante de la predicción para este diseño optimal D modificado, y en la figura 11-29b se muestra la gráfica de la superficie de respuesta. El criterioD para este diseño es |(X'X)-1| = 3.71 E-4, y la eficiencia relativa es

Es decir, este diseño es casi tan eficiente como el diseño optimalD. La traza de (X'X)-1 es 2.448 para este diseño, un valor ligeramente mayor que el que se obtuvo para el diseño optimal D. Los contornos de desviación estándar constante de la predicción para este diseño dan la impresión visual de ser al menos tan buenos como los del diseño optimal D, particularmente en el centro de la región.
Los diseños generados por computadora con base en los criterios de optimalidad alfabética pueden ser ciertamente útiles en situaciones en las que la región experimental no es ni esférica ni cuboidal. Sin embargo, no son sustitutos de los diseños estándares en la mayoría de los problemas. Los diseños optimales alfabéticos se generan apegándose estrictamente a un solo criterio y, como se señaló al principio de la sección 11-4, donde se enlistaron varios criterios para diferentes diseños, incluyen varios que son de carácter un tanto cualitativo o subjetivo. En problemas experimentales reales, por lo general hay muchos criterios que es necesario evaluar para seleccionar un diseño. Para un estudio más amplio de este tema, referirse a Myers y Montgomery [85a, capítulo 8].
Última modificación: martes, 26 de marzo de 2024, 23:21