11.7.2.- El Enfoque de la Superficie de Respuesta para el Diseño Robusto
Como se señaló en la sección anterior, las interacciones entre los factores controlables y los de ruido son la clave en un problema de diseño robusto. Por lo tanto, es lógico usar un modelo de respuesta que incluya tanto a los factores controlables como a los factores de ruido y sus interacciones. Para ilustrar, suponga que se tienen dos factores controlables x1 y x2 yun solo factor de ruido z1. Se supone que tanto los factores controlables como el de ruido se expresan como las variables codificadas usuales (es decir, tienen su centro en cero y tienen límites inferior y superior ±a). Si quiere considerarse un modelo de primer orden que incluya las variables controlables, un modelo lógico es

Observe que este modelo incluye los efectos principales de ambos factores controlables, su interacción, el efecto principal de la variable de ruido y las dos interacciones entre las variables controlables y la de ruido. A este tipo de modelo, el cual incorpora a las variables controlables y las de ruido, suele llamársele modelo de respuesta o de reacción. Excepto cuando al menos uno de los coeficientes de regresión δ11 y δ21 sea diferente de cero, no habrá ningún problema de diseño robusto.
Una ventaja importante del enfoque del modelo de respuesta es que tanto los factores controlables como los factores de ruido pueden colocarse en un solo diseño experimental; es decir, puede evitarse la estructura de los arreglos interior y exterior del enfoque de Taguchi. Al diseño que contiene tanto los factores controlables como los de ruido suele llamársele diseño de arreglo combinado.
Como se señaló anteriormente, se supone que las variables de ruido son aleatorias, aun cuando son controlables para los fines de un experimento. Específicamente, se supone que las variables de ruido están expresadas en unidades codificadas, que tienen valor esperado cero, varianza σ2z y que si hay varias variables de ruido, tienen covarianzas cero. Bajo estos supuestos es sencillo encontrar un modelo para la respuesta media tomando el valor esperado de y en la ecuación 11-28. Se obtiene así

donde elsubíndice z del operador expectativa es un recordatorio para tomar el valor esperado con respecto a ambas variables aleatorias de la ecuación 11-28, z1 y Ɛ. Para encontrar un modelo de la varianza de la respuesta y se usa el enfoque de la transmisión del error. Primero, el modelo de respuesta de la ecuación 11-28 se expande en una serie de Taylor de primer orden alrededor de z1 = 0. Se obtiene así
donde R es el término del residuo de la serie de Taylor. Como es común en la práctica, se ignorará el término del residuo. Ahora puede obtenerse la varianza de y aplicando el operador varianza en esta última expresión (sin R). El modelo para la varianza resultante es

De nueva cuenta se ha usado el subíndice z en el operador varianza como recordatorio de que tanto z1 como Ɛ son variables aleatorias.
Se han derivado modelos simples para la media y la varianza de la variable de respuesta de interés.
Observe lo siguiente:
1. Los modelos de la media y la varianza incluyen únicamente las variables controlables. Esto significa que es potencialmente posible fijar las variables controlables para alcanzar un valor objetivo de la media y minimizar la variabilidad transmitida por la variable de ruido.
2. Aun cuando en el modelo de la varianza intervienen sólo las variables controlables, incluye asimismo los coeficientes de regresión de la interacción entre las variables controlables y la de ruido. Es así como la variable de ruido influye en la respuesta.
3. El modelo de la varianza es una función cuadrática de las variables controlables.
4. El modelo de la varianza (dejando de lado σ2) es sólo el cuadrado de la pendiente del modelo de respuesta ajustado en la dirección de la variable de ruido.
Para dar un uso operacional a estos modelos sería necesario:1. Realizar un experimento y ajustar un modelo de respuesta apropiado, tal como la ecuación 11-28.
2. Sustituir los coeficientes de regresión desconocidos en los modelos de la media y la varianza con sus estimaciones de mínimos cuadrados del modelo de la respuesta o de reacción, y sustituir la σ2 del modelo de la varianza con el cuadrado medio de los residuales que se encontró cuando se ajustó el modelo de respuesta.
3. Optimizar los modelos de la media y la varianza utilizando los métodos estándares de optimización de respuestas múltiples revisadas en la sección 11-3.4.
Es muy sencillo generalizar estos resultados. Suponga que hay k variables controlables yrvariables de ruido. El modelo de respuesta general que incluye estas variables se escribirá como

donde f(x) es la porción del modelo que incluye sólo las variables controlables y h(x, z) son los términos que incluyen los efectos principales de los factores de ruido y las interacciones entre losfactores controlables y los de ruido. De manera típica, la estructura de h(x, z) es
La estructura de f(x) dependerá de cuálsea el tipo de modelo que el experimentador considere apropiado para las variables controlables. Las elecciones lógicas son el modelo de primer orden con interacción y el modelo de segundo orden. Si se supone que las variables de ruido tienen media cero, varianza σ2z y covarianzas cero, y que las variables de ruido y los errores aleatorios Ɛ tienen covarianzas cero, entonces el modelo de la media para la respuesta es

y el modelo de la varianza para la respuesta es

Myers y Montgomery [85a] presentan una forma un tanto más general de la ecuación 11-31 basada en la aplicación directa de un operador de varianza condicional al modelo de respuesta.
EJEMPLO 11-6
Para ilustrar el procedimiento anterior, considere nuevamente el ejemplo 6-2 en el que se estudiaron cuatro factores en un diseño factorial 24 para investigarsu efecto sobre la rapidez de filtración de un producto químico. Se supondrá que el factor A, la temperatura, es difícil de controlar en el proceso a gran escala, pero que puede controlarse durante el experimento (el cual se llevó a cabo en una planta piloto). Los otros tres factores, la presión (B), la concentración (C) y la velocidad de agitación (D), son fáciles de controlar. Por lo tanto, el factor de ruidoz1 es la temperatura, y las variables controlables x1, x2 y x3 son la presión, la concentración y la velocidad de agitación, respectivamente. Puesto que tanto los factores controlables como el factor de ruido están en el mismo diseño, el diseño factorial 24 utilizado en este experimento es un ejemplo de un diseño de arreglo combinado.
Utilizando los resultados del ejemplo 6-2, el modelo de respuesta es
Utilizando las ecuaciones 11-30 y 11-31,se encuentra que los modelos de la media y la varianza son

y
respectivamente. Suponga ahora que los niveles bajo y alto de la variable de ruido, temperatura, se corrieron a una desviación estándar a ambos lados de su valor típico o promedio, de tal modo que σ2z =1, y que se usa σ2 =19.51 (éste es el cuadrado medio de los residuales obtenido al ajustar el modelo de respuesta).
Por lo tanto, el modelo de la varianza queda como

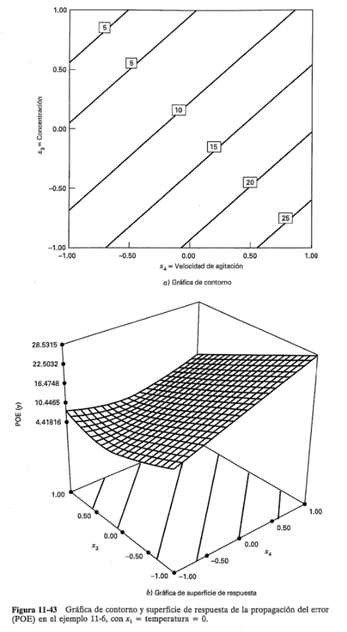
En la figura 11-42 se presenta la gráfica de contorno del paquete de software Design-Expert de los contornos de respuesta del modelo de la media. Para construir esta gráfica se fijó el factor de ruido (temperatura) en cero y el factor controlable no significativo (presión) también en cero. Observe que la rapidez de filtración promedio se incrementa cuando tanto la concentración como la velocidad de agitación se incrementan. Design-Expert constituirá también de manera automática gráficas de la raíz cuadrada de los contornos de la varianza, que denomina propagación del error (o POE, por sus siglas en inglés). Evidentemente, la POE no es sino la desviación estándar de la variabilidad que se transmite a la respuesta como una función de las variables controlables. En la figura 11-43 se muestra la gráfica de contorno y la gráfica de superficie de respuesta tridimensional de la POE, obtenida con Design-Expert (en esta gráfica la variable de ruido se mantiene constante en cero, como se explicó anteriormente).
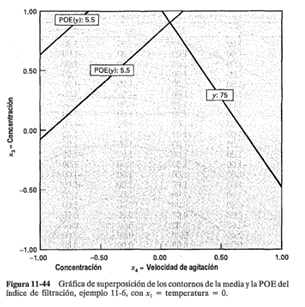
Suponga que el experimentador quiere mantener una rapidez de filtración promedio de cerca de 75 y minimizar la variabilidad alrededor de este valor. En la figura 11-44 se muestrauna gráfica de superposición de los contornos de la rapidez de filtración media y la POE como una función de la concentración y la velocidad de agitación, las variables controlables significativas. Para conseguir los objetivos deseados será necesario mantener la concentración en el nivel alto y la velocidad de agitación muy cerca del nivel intermedio.
El ejemplo 11-6 ilustra el uso de un modelo de primer orden con interacción como el modelo para los factores controlables, f(x). Se presenta ahora un ejemplo adaptado de Montgomery [80b] que induye un modelo de segundo orden.
EJEMPLO 11-7
En una fábrica de semiconductores se realizó un experimento que incluyó dos variables controlables y tres variables de ruido. En la tabla 11-23 se muestra el diseño de arreglo combinado utilizado por los experimentadores. El diseño es una variante de 23 corridas de un diseño central compuesto que se creó empezando con un DCC estándar para cinco factores (la porción del cubo es un diseño 25-1) Yeliminando las corridas axiales asociadas con las tres variables de ruido. Este diseño soportará un modelo de respuesta que tiene un modelo de segundo orden en las variables controlables, los efectos principales de las tres variables de ruido y las interacciones entre los factores controlables y los de ruido. El modelo de respuesta ajustado es

Los modelos de la media y la varianza son

y

donde se han sustituido las estimaciones de los parámetros del modelo de respuesta ajustado en las ecuaciones de los modelos de la media y la varianza y, como en el ejemplo anterior, se supone que σ2z =1. En las figuras 11-45 y 11-46 se presentan las gráficas (de Design-Expert) de contorno de la media y la POE del proceso (recuerde que la POE es la raíz cuadrada de la varianza de la superficie de respuesta) generadas a partir de estos modelos.
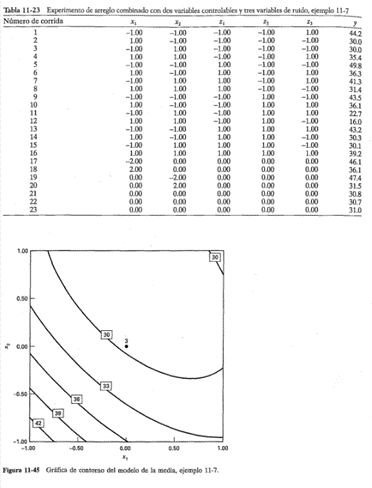
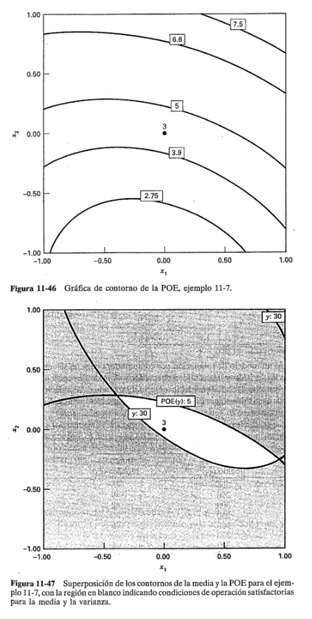
En este problema es deseable mantener la media del proceso abajo de 30. Al inspeccionar las figuras 11-45 y 11-46, es claro que se necesitará hacer un ajuste si se quiere hacer pequeña la varianza del proceso. Puesto que sólo hay dos variables controlables, una forma lógica de llegar a este arreglo es superponer los contornos de la respuesta media constante y la varianza constante, como se muestra en la figura 11-47. Esta gráfica muestra los contornos para los que la media del proceso es menor o igual que 30 y la desviación estándar del proceso es menor o igual que 5. La región delimitada por estos contornos representaría una zona de operación típica de respuesta media baja y varianza del proceso baja.
Última modificación: viernes, 29 de marzo de 2024, 14:34